

SOLID未分類 SOLID for Raspberry Pi 4 (連載21)
お気づきの方も多いかと思いますが、筆者の書いた割り込みハンドラは、「割り込み」の特色を全く生かしていないものです。
目的 ⇒「RustでSOLID-OSの割り込み機能を使うこと!」
であったため、「割り込みハンドラの在り方」については気にしていませんでした。
これで終わってしまっては、なんだかイマイチです。
(まぁ指摘受けたからそう言っていますが、、別にいいかなぁ♪なんて思ってました。)
では、どうあるべきか。
せっかくリアルタイムOS上で動いているんです。
待ってる間は自タスクをスリープにすべきでしょう。
具体的に書きます。
SPI転送(リード・ライト)関数は、転送開始後、転送完了フラグをポーリングすることで転送終了を待っています。これでは、CSレジスタのDONEビットをポーリングするのと大して違いありません。
せっかく転送終了したら割り込みハンドラが起動するのだから、その起動した割り込みハンドラによって起こしてもらうようにすべきです。
SPI転送(リード・ライト)関数:
SPI転送を開始(TAビットを1)したら寝る。
割り込みハンドラ:
転送終了したら、SPI転送(リード・ライト)関数を起こす。
実装方法は以下のような感じになりそうです。
タスクスリープ対応SPI転送(リード・ライト)関数:
①自タスクIDを取得する。
②取得したIDをアトミックなグローバル変数に格納する
③既存のSPI転送開始処理を行う
④スリープする
⑤タスクIDを取り除く
割り込みハンドラ:
①既存の処理を行う
②転送が終了していれば、
・アトミックなグローバル変数から対象のタスクID値を取得
・対象のタスクをwakeupさせる。
ひとつひとつ、コード例を教えてもらったので、見ていきます。
アトミックとして、共有できるようにします。
/// アクティブなSPI転送の発行元タスクIDを格納するグローバル変数。
/// 制御機構を独占するためのミューテックスの役割も兼ねる。
static XFER_ACTIVE_TID: AtomicI32 = AtomicI32::new(0);
itron関数を使用してIDを取得します。
let mut tid = 0;
assert_eq!(unsafe { itron::abi::get_tid(&mut tid) }, itron::abi::E_OK);
assert_ne!(tid, 0);
先程準備したグローバル変数に格納します。
XFER_ACTIVE_TID.compare_exchange(0, tid, Ordering::AcqRel, Ordering::Relaxed)
.expect("transfer already in progress");
itron関数のslp_tsk()を使用します。
assert_eq!(unsafe { itron::abi::slp_tsk() }, itron::abi::E_OK);
先程準備したグローバル変数に格納されたタスクIDを取り除きます。
XFER_ACTIVE_TID.store(0, Ordering::Release);
グローバル変数から対象のタスクIDを取得し、itron関数のwup_tsk()を使用しwakeupさせます。
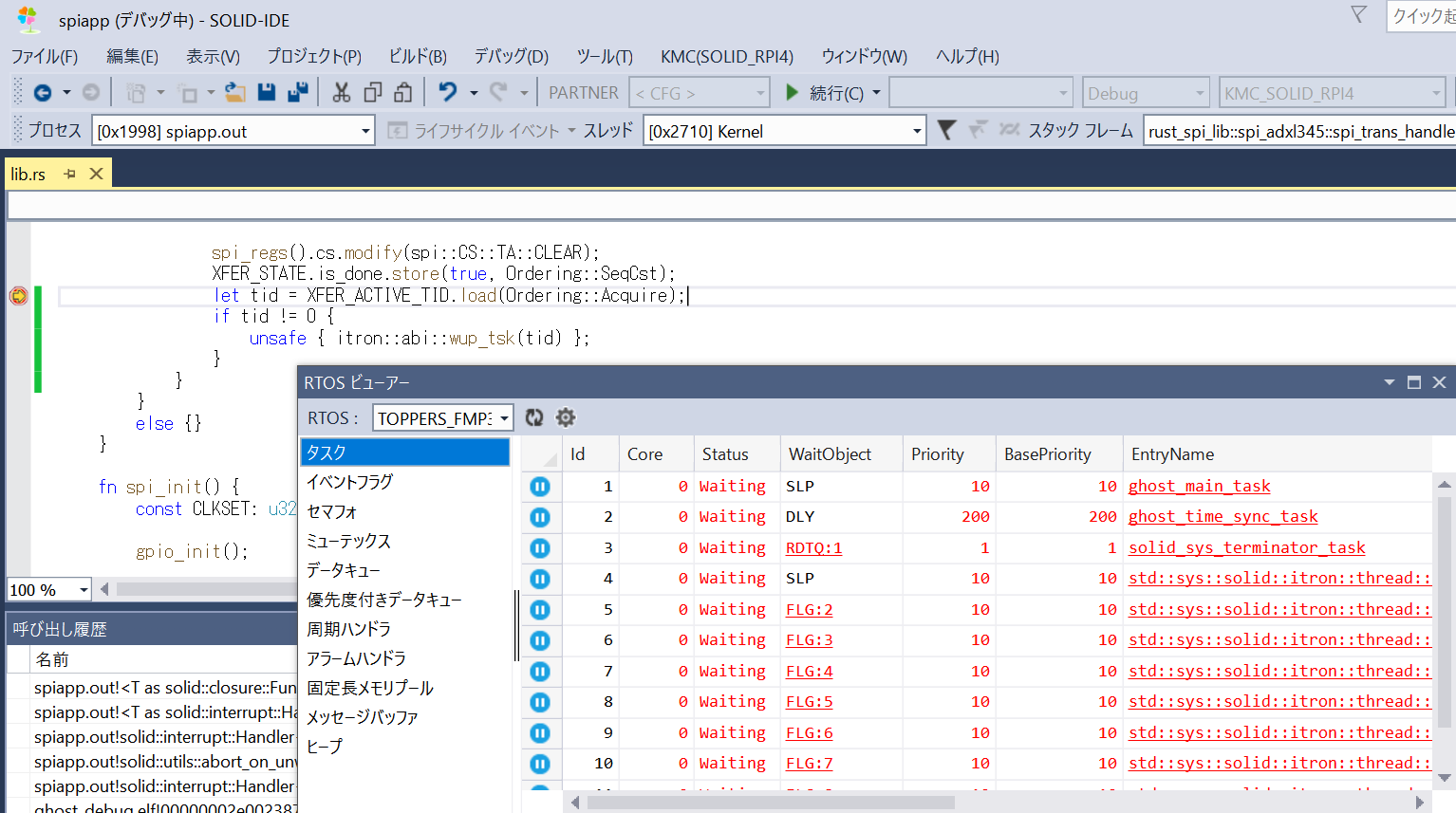
let tid = XFER_ACTIVE_TID.load(Ordering::Acquire);
if tid != 0 {
unsafe { itron::abi::wup_tsk(tid) };
}コード例っていうか。。。
そのまま動くやん!
無事、動作確認ができました!
割り込みハンドラで、対象タスクのスリープ解除をする直前でブレークしてみました。
SOLID-IDEのRTOSビューアで見てみると、スリープになっている事がわかります。
#ご紹介した以外にも、イベントフラグを用いる方法もあります。
前回、SPI転送完了割り込みの優先度について、とりあえず 10 固定にしました。
今回は、SOLID-OSのSOLID_INTC_GetPriorityLevel()関数を使って、システムで許されている最大値を取得し、その付近の値を優先度として設定してみます。
SOLID_INTC_GetPriorityLevel()関数は、solidクレートの中で、C言語の関数をコールするためのWrapperが定義されています。。
https://github.com/KyotoMicrocomputer/solid-rapi4-examples/blob/main/common/solid/src/abi.rs
solidクレートの中の、abiの中にあるので、
solid::abi::SOLID_INTC_GetPriorityLevel()で使用できます。
さらに、C言語なので戻り値がc_int型です。
![]()
i32型に変換するため、
.into()
を付けます。
すると、今度は unsafeだよ!と怒られました。
![]()
という事で、unsafe{ }で囲んだところ、エラーがなくなりました。
let spi_handler_option = interrupt::HandlerOptions::new(interrupt::Number(150), unsafe{solid::abi::SOLID_INTC_GetPriorityLevel().into()});このコードを実行してみます。
max_priorityには何が入っているでしょうか。
![]()
16ですね。
– 2 として、優先順位14あたりがいいかもしれません。
let max_priority: i32 = unsafe{solid::abi::SOLID_INTC_GetPriorityLevel().into()};
let spi_handler_option = interrupt::HandlerOptions::new(interrupt::Number(150), max_priority - 2);