

SOLID未分類 SOLID for Raspberry Pi 4 (連載16)
さて、ここでSPIのことを思い出します。
現時点では、TCP/IPサーバとして、来たデータをそのまま返すという動きをしています。
これを変更して、
「何かデータが来たら、加速度値を返す」
ようにしてみます。
fn serve_client()関数の中で、返すデータを作成しています。
match (&*client_fd).write_all(&buffer[..num_read_bytes]) {
Err(e) if e.kind() == io::ErrorKind::WriteZero => {
break;
}
result => result?,
};
ここを、加速度値をセンサから取得しその値を返す、というコードに変更してみます。
加速度値をセンサから取得:
let axis_array: [f32; 3] = spi_adxl345::current_acceleration_array();
これでしたね。
axis_arrayはf32の型を持つ配列でした。
一方、ネットワーク送信用バッファの型を見てみます。
送信関数 write_allを軽くマウスでポイントしてみると、情報が表示されます。
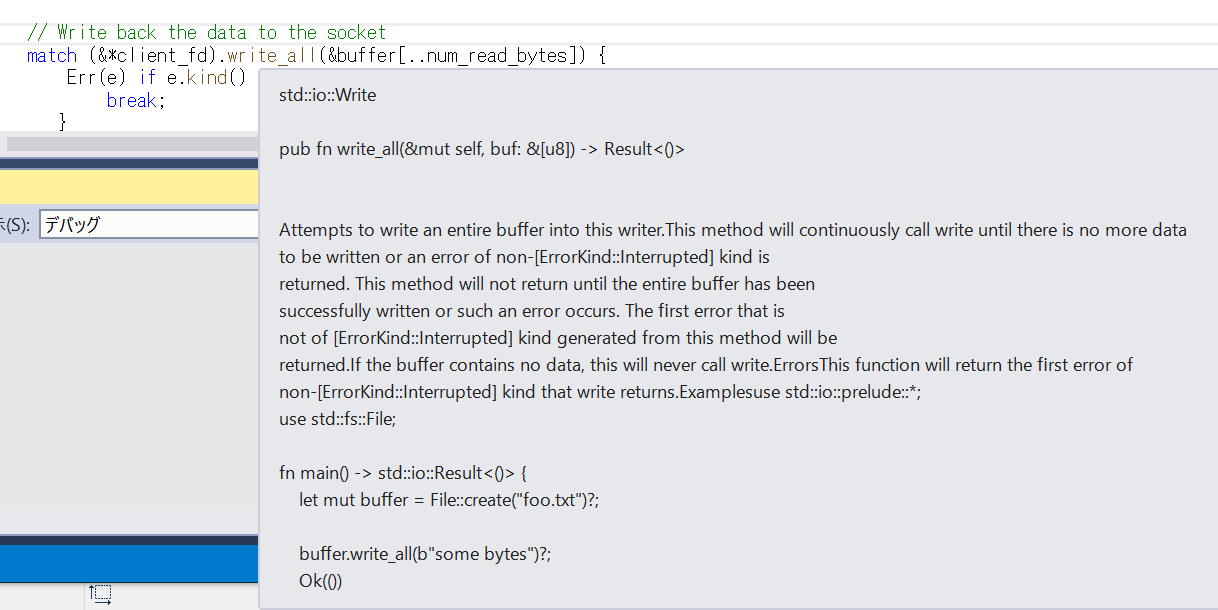
u8型の配列ですね。
という事は、また型変換ですね(汗)
今度は32ビットのfloatからu8への型変換。
もう慣れました。何かあるんでしょう?便利なのが。
https://doc.rust-lang.org/std/primitive.f32.html#method.to_le_bytes
ほら、あった。
//let bytes = 0x12345678u32.to_le_bytes();
//assert_eq!(bytes, [0x78, 0x56, 0x34, 0x12]);
(ちなみに前回はこの逆、「from_le_bytes」を使いました。)
という事で、このように書きました。
let axis_array: [f32; 3] = spi_adxl345::current_acceleration_array();
println!("x_axis:{} y_axis:{} z_axis:{}", axis_array[0], axis_array[1], axis_array[2]);
let retbytes_x: [u8; 4] = axis_array[0].to_le_bytes();
let retbytes_y: [u8; 4] = axis_array[1].to_le_bytes();
let retbytes_z: [u8; 4] = axis_array[2].to_le_bytes();
let mut retbytes: [u8; 12] = [0x00; 12];
for n in 0..4 {
retbytes[n] = retbytes_x[n];
retbytes[n+4] = retbytes_y[n];
retbytes[n+8] = retbytes_z[n];
}
match (&*client_fd).write_all(&retbytes) {
Err(e) if e.kind() == io::ErrorKind::WriteZero => {
break;
}
result => result?,
};
PC側で、加速度値を取得&表示するアプリをC#で作ってみました。
仕様:
get dataボタン押下:
ホスト名「raspberrypi」にポート「7777」で接続し、何か適当にデータを送信。
受信した12バイトのデータを4バイトごとに区切り、それぞれf32変換することでX,Y,Z軸の加速度値を得る。
さらにそれらを文字列に変換し、表示する。
こちらのC#アプリでも、型変換を二回行っています。
「受信した12バイトのデータを4バイトごとに区切り、それぞれf32変換」
「さらにそれらを文字列に変換」
ご参考に、C#の場合はこう書けます、というのをご紹介。
・受信した12バイトのデータを4バイトごとに区切り、f32変換
指定オフセット値から4バイトを抽出するので、以下のように書きました。
float x_axis = BitConverter.ToSingle(data, 0);
float y_axis = BitConverter.ToSingle(data, 4);
float z_axis = BitConverter.ToSingle(data, 8);
・文字列に変換
showstrings という文字列で、ダイアログボックスに表示する文字列を作成しています。このように書きました。
showstrings = "x:" + x_axis.ToString() + " y:" + y_axis.ToString() + " z:" + z_axis.ToString();
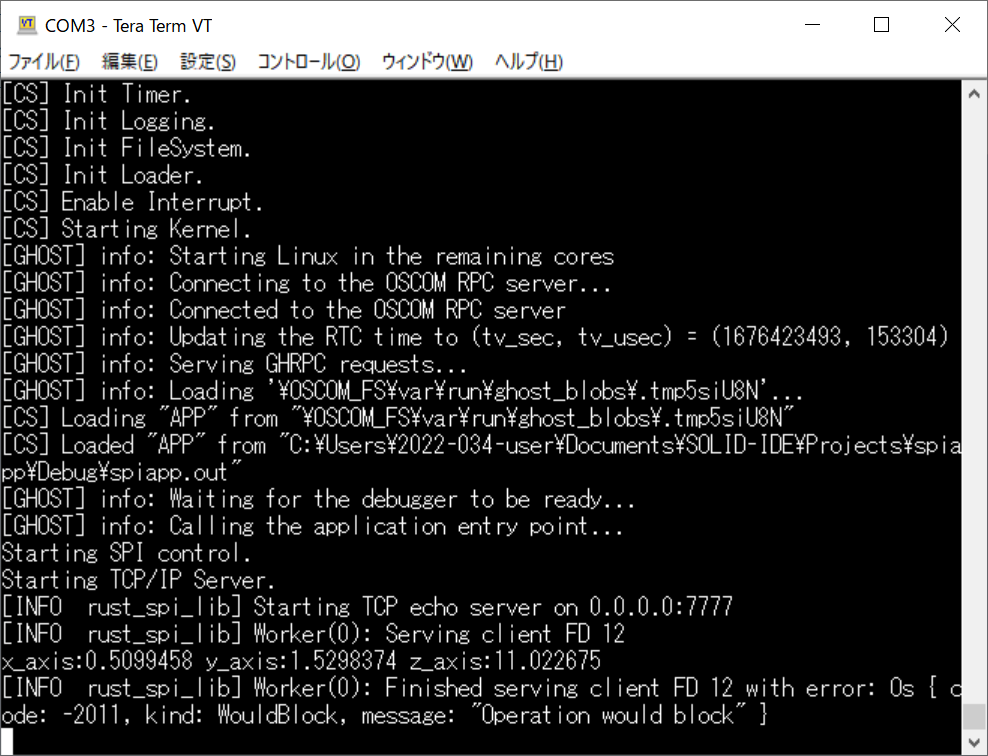
実行してみます。
SOLID側のUART出力は以下のようになりました。
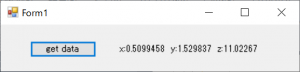
PCアプリは以下のようになりました。
今回はここまで。
次回は、
・常に最新の加速度値を100個キープしておく
・TCP/IPサーバ経由で、その瞬間の100個の加速度値を送信する
という変更を行う予定です。
これには、(今わかるだけでも)3つ、筆者にとっての試練があります。
その1:加速度値取得をスレッド化
その2:スレッド間のデータ受け渡し
その3:100個キープするためのリングバッファの実装
まだ先が長いなぁ。。。