SOLID未分類 SOLID for Raspberry Pi 4 (連載14)
前回、SPIレジスタの読み書きを正しくできるようにすることが目的だったため、SPI通信先とのアドレス指定、書き込みデータは固定していました。
今回は、上位関数からそれらを指定できるようにします。
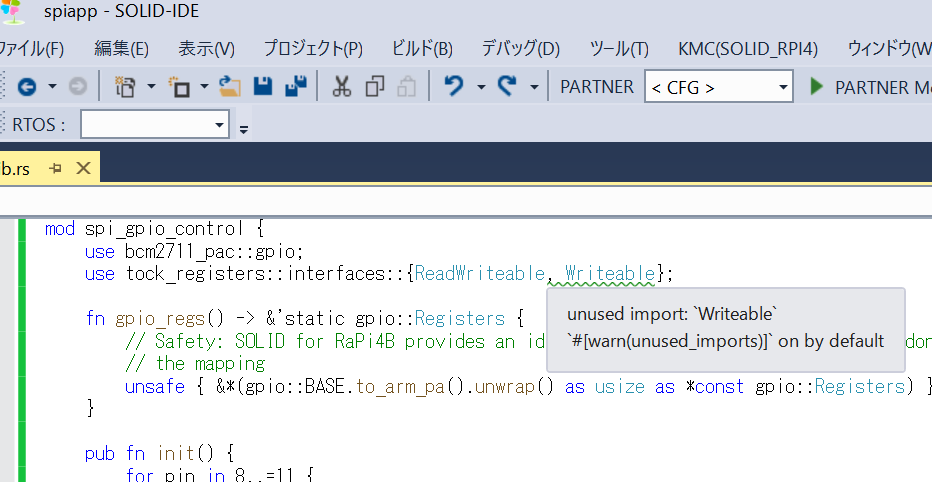
Writeableは使っていないので、Warningになっています。
これは削除し,
use tock_registers::interfaces::ReadWriteable;
とします。
先述の通り、前回は動作確認のため、SPI通信先との書き込み先のレジスタアドレス指定、さらに書き込みデータも固定していました。
今回は、この関数に引数を持たせます。
引数:
・アクセスしたいSPI通信先(加速度センサADXL345)のレジスタアドレス値
・書き込みたいデータ
ついでに、senddata関数という関数名はあまり意図にそぐわないので、関数名も変えてしまいましょう。
regwrite関数とします。
ではregwrite関数に引数を二つ持たせましょう。
C言語では、
void regwrite(uint32_t regaddr, uint32_t writeval) {
ですね。
Rustではこうなります。
pub fn regwrite(regaddr: u32, writeval: u32) {
(心の声:逆やん!)
あとはこの引数を、実際に使用するコードで使えばよいだけです。
一回目のFIFOに書き込むデータとしてregaddr、2回目としてwritevalを指定するだけです。
ソースコードは後でまとめて記載します。
次に、加速度センサのレジスタをリードする関数を追加します。
関数名はpub fn regread(regval: u32)にします。引数はアドレス値です。
SOLID-OSでは、SPIレジスタなどの内蔵I/O領域は非キャッシュに設定されています。
このため、今回はキャッシュ動作を意識することなくコードが書けます。
これはOSの仕様でありRustの仕様ではありません。
また、内蔵I/Oの中にはアクセス幅が限定されているものもありますが、そちらはbcm2711_pacであらかじめ定義されているので、ここでは意識する必要はありません。
フローは以下です。
(1)CSレジスタのTAビットを1にする。
(2)TX-FIFO, RX-FIFOクリア
(3)FIFOに送信データを書く(送信データ:ライト対象の加速度センサのレジスタ値)
(4)CSレジスタのTXDビットが1になるまで待つ
(5)CSレジスタのRXDビットが1になるまで待つ(後述。(注)参照)
(6)CSレジスタのCLEARビットに0x02を書いてRX-FIFOクリア
(7)FIFOに送信データを書く(送信データ:押し出すだけなのでダミーで0)
(8)CSレジスタのTXDビットが1になるまで待つ
(9)CSレジスタのRXDビットが1になるまで待つ
(10)待ち終わったらFIFOリード
(11)FIFOに送信データを書く(送信データ:押し出すだけなのでダミーで0)
(12)CSレジスタのTXDビットが1になるまで待つ
(13)CSレジスタのRXDビットが1になるまで待つ
(14)待ち終わったらFIFOリード
(15)CSレジスタのDONEビットが1になるまで待つ
(16)CSレジスタのCLEARビットに0x03を書いてTX-FIFO, RX-FIFOクリア
(17)CSレジスタのTAビットを0にして送受信完了。
(注):ここでは読み込みは行わないのでRX-FIFOにデータが入ったことを確認する必要は基本的にはない。しかし、ここでシフトインされてくるデータがあるのも事実。
このため、今ここでシフトインされてくるデータを確実にRX-FIFOに格納した上でRX-FIFOをクリアすることで、確実にこのシフトインデータを読み飛ばしている。
この通りに実装してみましたが、一点だけひっかかったポイントがありました。
今まで、BCM2711の内蔵I/Oレジスタに対し、write, is_set, modify操作は行ってきましたが、純粋にreadしたことはありませんでした。
でもなんとなく、こんな感じ?と思って書いたらビルドが通りました。
retdata_l = spi_regs().fifo.read(spi::FIFO::DATA);
ビルド通ったから読めてるんだろう、という事で、次に進みます。
このセンサの場合、加速度値は2回にわたってリードされます。
上位8ビットと下位8ビットです。
(正確には、上位5ビットですが、符号拡張計算の都合上8ビットで処理します。)
以下のように読みました。
let retdata_h: u32;
let retdata_l: u32;
:
retdata_l = spi_regs().fifo.read(spi::FIFO::DATA); //一回目
:
retdata_h = spi_regs().fifo.read(spi::FIFO::DATA); //二回目
rdata_hを8ビット左シフトし、retdata_lと加算すればOKです。
let retdata: i32;
:
retdata = retdata_l | (retdata_h << 8)
この書き方はC言語と一緒ですね。
リード値を返す必要があります。すなわち、この関数は戻り値を持ちます。
まず、戻り値の型をどうするか?ですが、これは加速度センサなので符号付きの32ビット値にした方が後々都合良さそうです。(考え方はいろいろあると思いますが、一例として)
なので、i32の型で戻り値を定義しましょう。
pub fn regread(regval: u32) -> i32 {
次に、リターン値を考えます。
読めたレジスタを返すのですが、型が違います。u32型です。
変換しなきゃ。
u32からi32への変換にtry_fromを使ってみることにします。
i32変換し、その値をreturnで返します。
i32の変換値 = i32::try_from(FIFOリード値).unwrap();
ふむふむ、なかなか良さそうです。
という事で、以下のようになりました。
retdata = i32::try_from(retdata_l | (retdata_h << 8)).unwrap();
さらに、ここで符号付きに変換しておきましょう。
という事で、
retdata = i32::try_from(retdata_l | (retdata_h << 8)).unwrap();
if (retdata & 0x8000) != 0x0000 {
retdata = (!retdata & 0xFFFF) + 1;
retdata = 0 - retdata;
}
return retdata;
と、なりました。
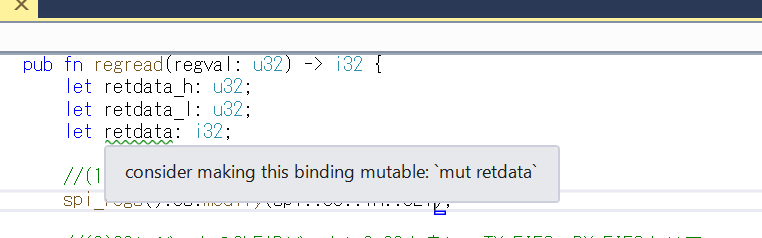
そして、この計算により、retdataは定数ではなく変数になるので、mutを付けないといけません。
と、ビルドする前に教えてくれました。
作成したregread関数を用いて、加速度センサ値を取得していきます。
X, Y, Z軸の3値があります。
| レジスタ名 | アドレス |
| DATAX0,1 | 0x32 (0xc2と指定) |
| DATAY0,1 | 0x34 (0xc4と指定) |
| DATAZ0,1 | 0x36 (0xc6と指定) |
#連続リードを行うため、アドレスの上位2ビットは0b11である必要があります。
さらに、読み込んだ加速度センサ値に対して0.0392266を掛ける事で、加速度値が算出できます。
0.0392266= (4/1000*9.80665)と計算しました。
ここで一点、引っ掛かりました。
これは浮動小数点の計算になるのですが、加速度センサを読み込んだ値はi32型です。
f32に変換しないといけないです。
ビルドするとエラーが出て、修正方法を教えてくれました。
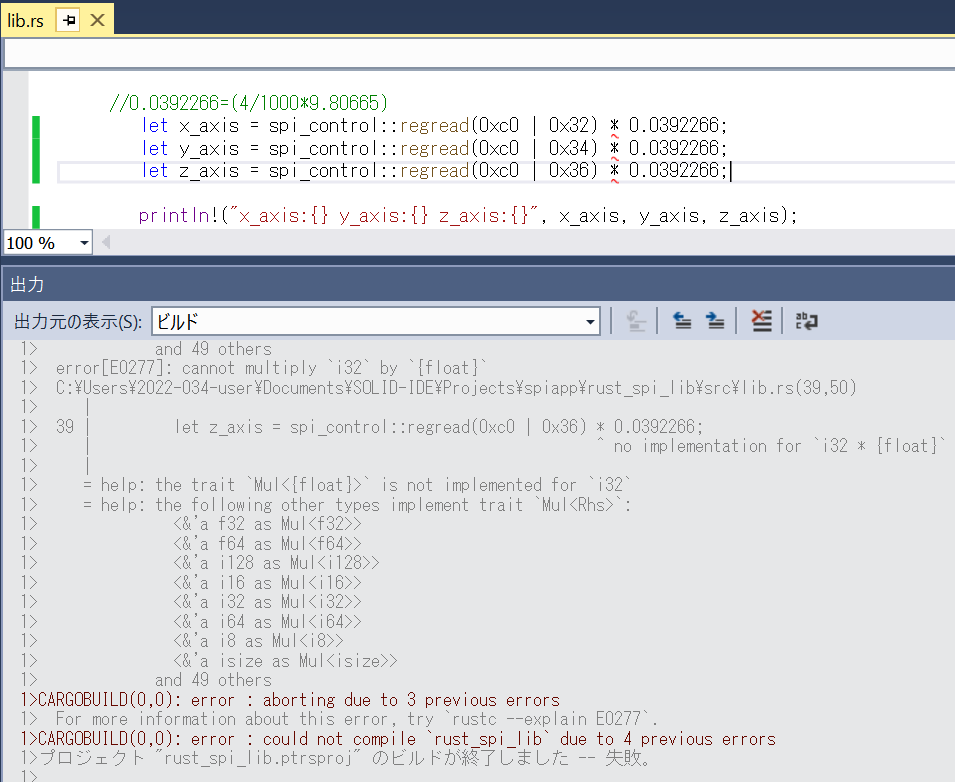
i32のままでは計算できないよ。
以下のどれかを選んで。
という事で、f32を選びました。
let x_axis = spi_control::regread(0xc0 | 0x32) as f32 * 0.0392266;
取得できたX, Y, Z軸の加速度値をprintln!マクロでUART出力し、PCのシリアルターミナルで見てみます。
加速度値取得の間隔はとりあえず500msとしました。
500msくらいあけないと、シリアルターミナルに表示されている文字スクロールが早すぎて見えないので。
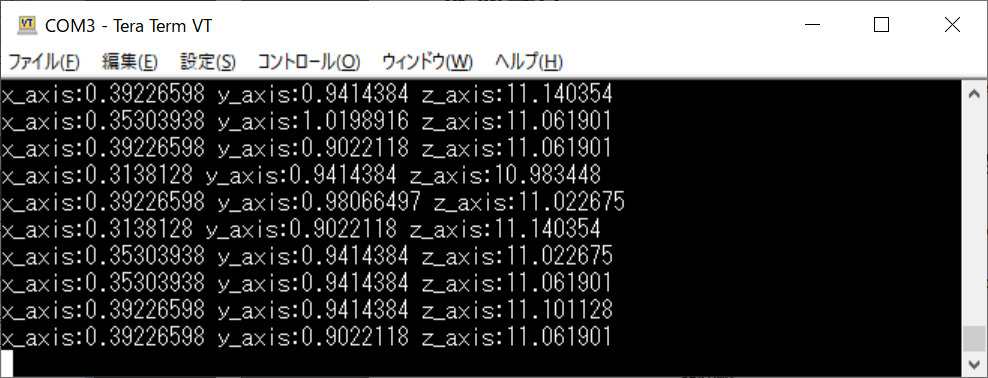
おおー。取れてる取れてる。
Z軸方向の加速度が大きめに出てます。
キャリブレーションしないといけないですね。
値の正確性は、今回特に本質でないので、このままにしましょう。
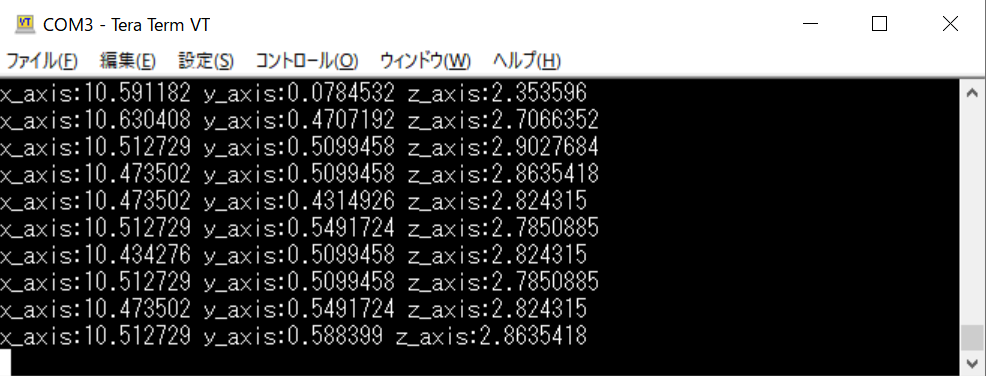
X軸方向を上に向けてみました。
Y軸方向を下に向けてみました。
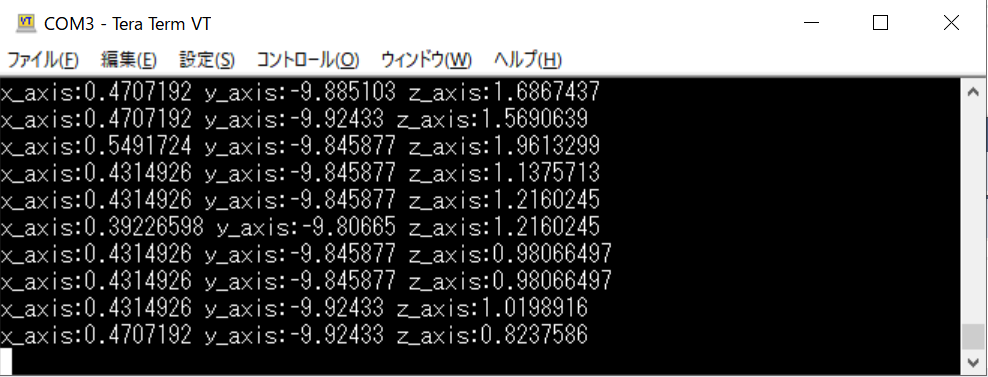
ちゃんとマイナスも計算できてます。
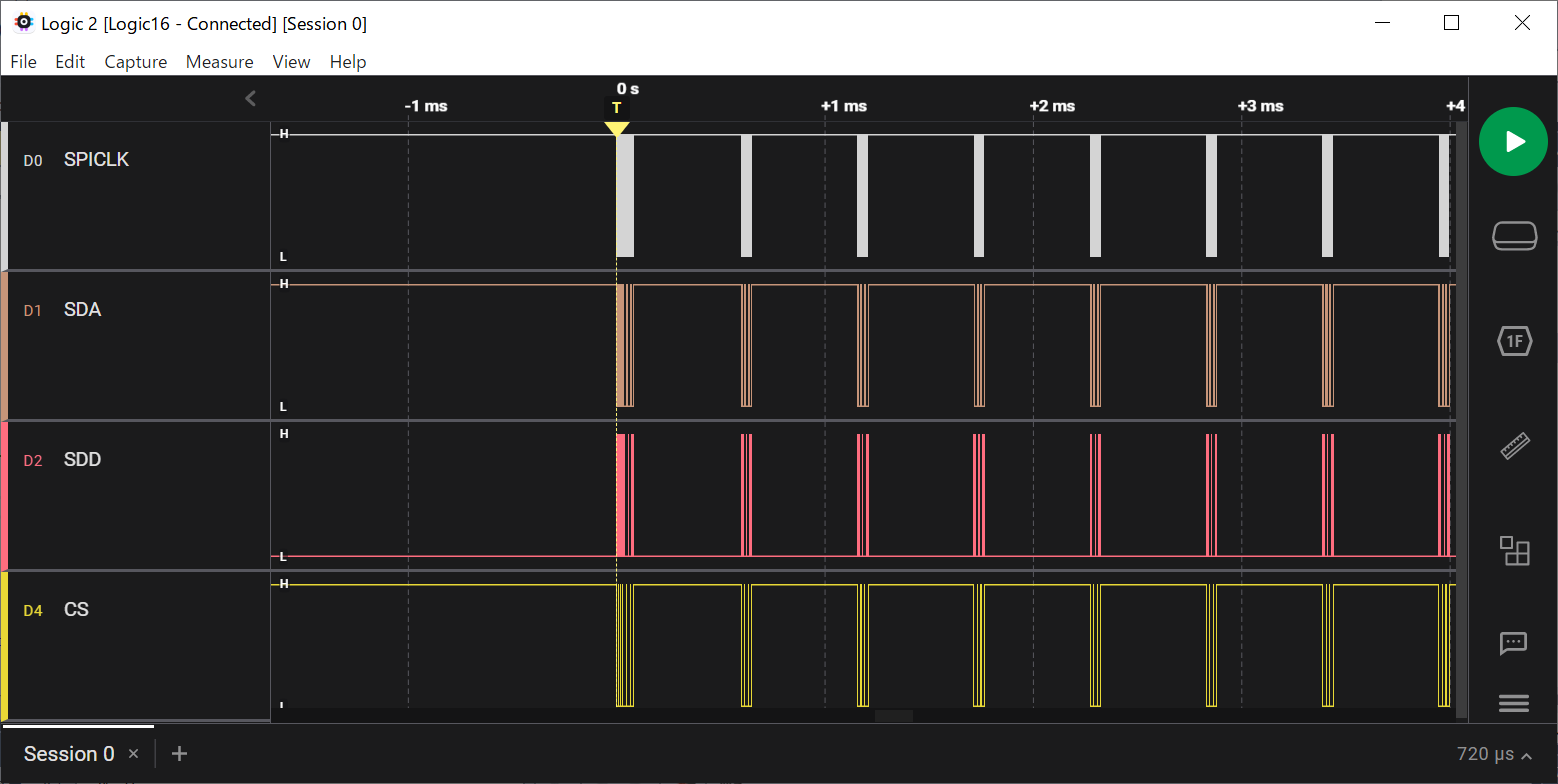
一つ目のデータ出力について、波形を取得してみました。
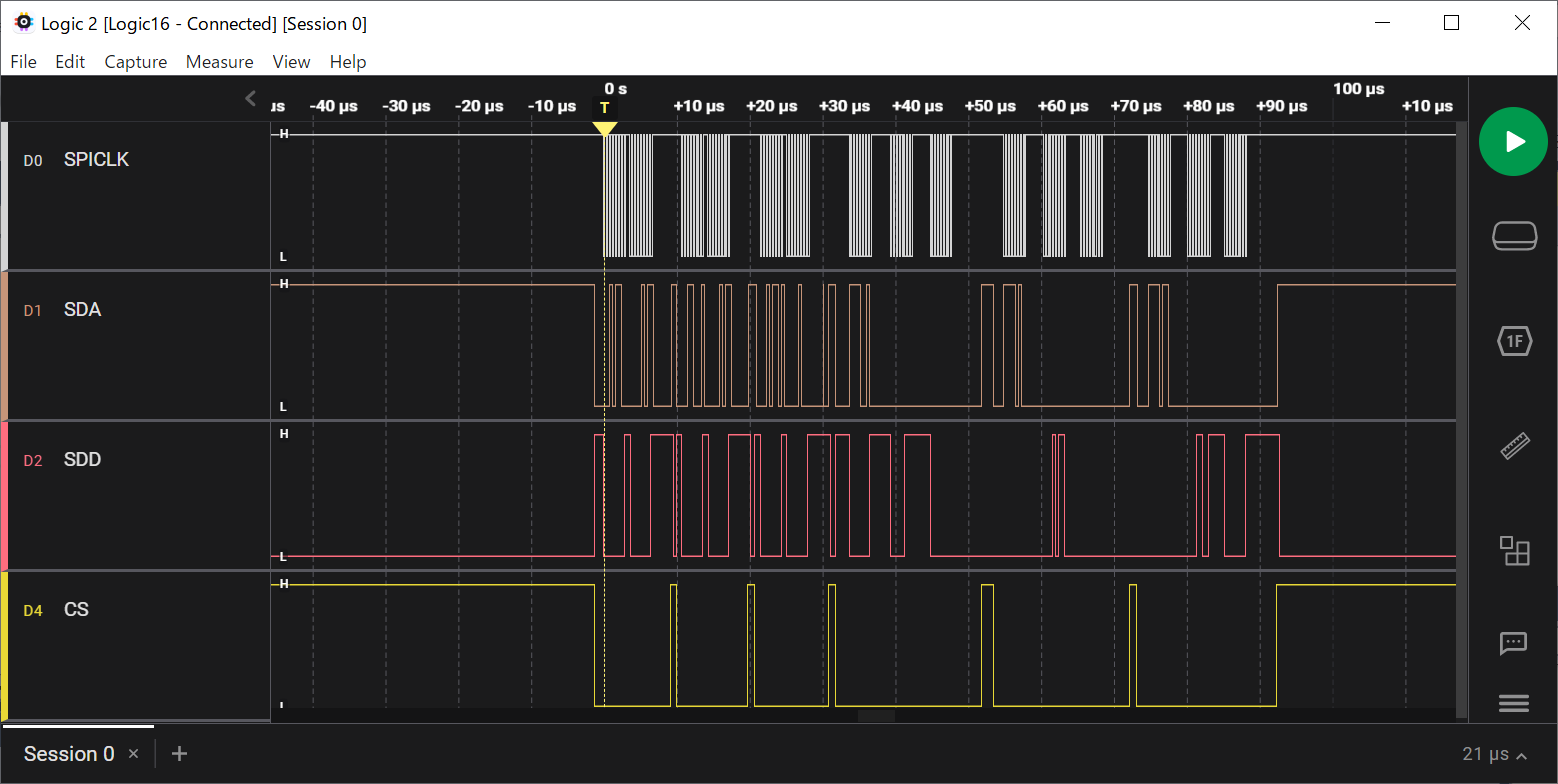
CS信号ベースで見て、6個のかたまりがあります。
最初の3つは初期設定のところ。
続く3つは、一回目の加速度値取得です。
ついでに、加速度値取得間隔を0.5msにしてみました。
println!の実行には時間がかかるのでコメントアウトしました。
今回は全体を見る感じで波形を取得してみました。