

SOLID未分類 SOLID for Raspberry Pi 4 (連載11)
という事で、以下のようなデモを作成したいと思います。
[ハードウェア構成]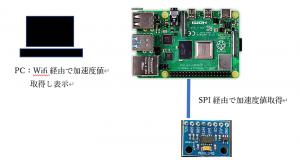
Raspberry pi 4Bの各端子について今回使用する設定と、対応する加速度センサADXL345との結線は以下となります。
| Raspberry Pi端子番号 | bcm2711 GPIO番号 | 使用する端子機能 | Function select No. | ADXL345端子名 |
|---|---|---|---|---|
| 19 | GPIO10 | SPI0_MOSI | ALT0 | SDI |
| 21 | GPIO9 | SPI0_MISO | ALT0 | SDO |
| 23 | GPI11 | SPI0_SCLK | ALT0 | SCLK |
| 24 | GPIO8 | SPI0_CE0# | ALT0 | CS |
※Function select No.とは、bcm2711に設定するための端子マルチプレクス設定番号です。
[ソフトウェア構成]・Windows PC側
簡単なTCP/IPクライアントをC#で書く
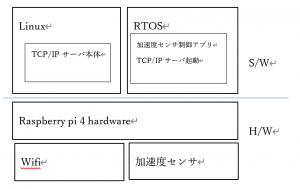
・Raspberry pi 側
以下のようなソフトウェアブロックになる
作っている途中、何かに気が付いたら柔軟に仕様変更をしつつ、作り上げていきたいと思いますので、長くなりそうですがお付き合いいただければ嬉しいです。