

SOLID未分類 SOLID for Raspberry Pi 4 (連載3)
まずタスクを二つ起動させ、相互にイベントフラグでやり取りをする、簡単なプログラムを書いてみます。
SOLID for Raspberry pi 4では、動的生成可能なカーネル資源数は固定されており、カーネルコンフィグを行えない仕様です。
制限事項についてはこちらに記載されています。
※カーネルコンフィグをしたい場合、有償版を入手すれは可能です。
という事で、acre_tsk()を使ってタスクを動的生成します。
新規ワークスペースを作成し、main.cppに書いたコードは以下です。
・インクルードファイルや外部変数などの定義
#include <solid_log.h>
#include <itron.h>
#include <kernel.h>
#include <stdlib.h>
#ifdef SOLID_SMP
#include <solid_smp.h>
#define __cpuid() SOLID_SMP_GetCpuId()
#endif
/*
* 優先度の定義
*/
#define HIGH_PRIORITY 4 /* 高優先度 */
#define MID_PRIORITY 9 /* 中優先度 */
#define LOW_PRIORITY 14 /* 低優先度 */
/*
* ターゲットに依存する可能性のある定数の定義
*/
#ifndef STACK_SIZE
#define STACK_SIZE 4096 /* タスクのスタックサイズ */
#endif /* STACK_SIZE */
extern void test_task1(VP_INT exinf);
extern void test_task2(VP_INT exinf);
FLGPTN setptn_wakeup_from_task1 = 0x01;
FLGPTN setptn_stop_from_task1 = 0x02;
FLGPTN setptn_notify_to_task1 = 0x10;
・main関数
extern "C" void slo_main()
{
ER ercd;
static T_CTSK tsk1, tsk2;
ID flag;
T_CFLG cflg;
// 各タスクと同期を行うためのイベントフラグを生成
cflg.flgatr = TA_WMUL | TA_TPRI;
cflg.iflgptn = 0;
ercd = acre_flg(&cflg);
if (ercd < 0)
{
SOLID_LOG_printf("error:acre_flg, err=%d\n", ercd);
while (1)
;
}
flag = ercd;
// タスク動的生成のための情報設定
tsk1.tskatr = TA_NULL;
tsk1.exinf = (ID)flag;
tsk1.task = test_task1;
tsk1.itskpri = MID_PRIORITY;
tsk1.stksz = STACK_SIZE;
tsk1.stk = NULL; // スタックはカーネルが自動的に割り当てる(SOLIDのスタックフェンスが有効)
tsk1.iprcid = 1;
tsk1.affinity = UINT_MAX;
// タスク動的生成のための情報設定
tsk2.tskatr = TA_NULL;
tsk2.exinf = (ID)flag;
tsk2.task = test_task2;
tsk2.itskpri = MID_PRIORITY;
tsk2.stksz = STACK_SIZE;
tsk2.stk = NULL; // スタックはカーネルが自動的に割り当てる(SOLIDのスタックフェンスが有効)
tsk2.iprcid = 2;
tsk2.affinity = UINT_MAX;
ercd = acre_tsk(&tsk1);
SOLID_LOG_printf("tsk1: acre_tsk() returned: %d\n", ercd);
if (ercd > 0)
{
ercd = act_tsk(ercd);
SOLID_LOG_printf("tsk1: act_tsk() returned: %d\n", ercd);
}
else
{
SOLID_LOG_printf("tsk1: faild to create task\n", ercd);
}
ercd = acre_tsk(&tsk2);
SOLID_LOG_printf("tsk2: acre_tsk() returned: %d\n", ercd);
if (ercd > 0)
{
ercd = act_tsk(ercd);
SOLID_LOG_printf("tsk2: act_tsk() returned: %d\n", ercd);
}
else
{
SOLID_LOG_printf("tsk2: faild to create task\n", ercd);
}
return;
}
・task1
void test_task1(VP_INT exinf)
{
FLGPTN ptn;
ER ercd;
ID flag;
SOLID_LOG_printf("[TASK1] Start TASK1\n");
flag = (ID)exinf;
dly_tsk(1000'000); //1sec
while (1)
{
SOLID_LOG_printf("[TASK1] Wakeup TASK2.\n");
ercd = set_flg(flag, setptn_wakeup_from_task1);
SOLID_LOG_printf("[TASK1] set_flg() returned: %d\n", ercd);
// イベントフラグ待ち処理
SOLID_LOG_printf("[TASK1] Waiting reply from TASK2...\n");
ercd = wai_flg(flag, setptn_notify_to_task1, TWF_ORW, &ptn);
SOLID_LOG_printf("[TASK1] wai_flg() returned: %d\n", ercd);
SOLID_LOG_printf("[TASK1] Got reply from TASK2.\n");
ercd = clr_flg(flag, ~setptn_notify_to_task1);
SOLID_LOG_printf("[TASK1] clr_flg() returned: %d\n", ercd);
dly_tsk(1000'000); //1sec
// イベントフラグセット
SOLID_LOG_printf("[TASK1] Stop TASK2.\n");
ercd = set_flg(flag, setptn_stop_from_task1);
SOLID_LOG_printf("[TASK1] set_flg() returned: %d\n", ercd);
// イベントフラグ待ち処理
SOLID_LOG_printf("[TASK1] Waiting reply from TASK2...\n");
ercd = wai_flg(flag, setptn_notify_to_task1, TWF_ORW, &ptn);
SOLID_LOG_printf("[TASK1] wai_flg() returned: %d\n", ercd);
SOLID_LOG_printf("[TASK1] Got reply from TASK2.\n");
ercd = clr_flg(flag, ~setptn_notify_to_task1);
SOLID_LOG_printf("[TASK1] clr_flg() returned: %d\n", ercd);
dly_tsk(1000'000); //1sec
}
return;
}
・task2
void test_task2(VP_INT exinf)
{
FLGPTN ptn;
ER ercd;
ID flag;
SOLID_LOG_printf("[TASK2] Start TASK2\n");
flag = (ID)exinf;
while (1)
{
// イベントフラグ待ち処理
SOLID_LOG_printf("[TASK2] Waiting reply from TASK1...\n");
ercd = wai_flg(flag, setptn_wakeup_from_task1, TWF_ORW, &ptn);
SOLID_LOG_printf("[TASK2] wai_flg() returned: %d\n", ercd);
SOLID_LOG_printf("[TASK2] Got reply from TASK1.\n");
ercd = clr_flg(flag, ~setptn_wakeup_from_task1);
SOLID_LOG_printf("[TASK2] clr_flg() returned: %d\n", ercd);
// イベントフラグセット
SOLID_LOG_printf("[TASK2] Reply to TASK1.\n");
ercd = set_flg(flag, setptn_notify_to_task1);
SOLID_LOG_printf("[TASK2] set_flg() returned: %d\n", ercd);
// イベントフラグ待ち処理
SOLID_LOG_printf("[TASK2] Waiting reply from TASK1...\n");
ercd = wai_flg(flag, setptn_stop_from_task1, TWF_ORW, &ptn);
SOLID_LOG_printf("[TASK2] wai_flg() returned: %d\n", ercd);
SOLID_LOG_printf("[TASK2] Got reply from TASK1.\n");
ercd = clr_flg(flag, ~setptn_stop_from_task1);
SOLID_LOG_printf("[TASK2] clr_flg() returned: %d\n", ercd);
// イベントフラグセット
SOLID_LOG_printf("[TASK2] Reply to TASK1.\n");
ercd = set_flg(flag, setptn_notify_to_task1);
SOLID_LOG_printf("[TASK2] set_flg() returned: %d\n", ercd);
}
return;
}このプログラムは、以下の動作をします。
| 順番 | task1 | task2 |
|---|---|---|
| ① | 1秒待つ | イベントフラグ “setptn_wakeup_from_task1 “を待つ |
| ② | イベントフラグ “setptn_wakeup_from_task1 “セット | イベントフラグ取得⇒待ち解除 |
| ③ | - | イベントフラグをクリア |
| ④ | イベントフラグ “setptn_notify_to_task1”を待つ | - |
| ⑤ | イベントフラグ取得⇒待ち解除 | イベントフラグ “setptn_notify_to_task1”をセット |
| ⑥ | イベントフラグをクリア | - |
| ⑦ | - | イベントフラグ “setptn_stop_from_task1 “を待つ |
| ⑧ | イベントフラグ “setptn_stop_from_task1 “セット | イベントフラグ取得⇒待ち解除 |
| ⑨ | - | イベントフラグをクリア |
| ⑩ | イベントフラグ “setptn_notify_to_task1”を待つ | - |
| ⑪ | イベントフラグ取得⇒待ち解除 | イベントフラグ “setptn_notify_to_task1”をセット |
| ⑫ | イベントフラグをクリア | ①に戻る |
| ⑬ | ②に戻る | - |
※タスク生成・操作やイベントフラグ生成・操作のパラメータについては、uITRONの仕様書を参照してください。
実行すると、UART経由で以下のログが表示されます。
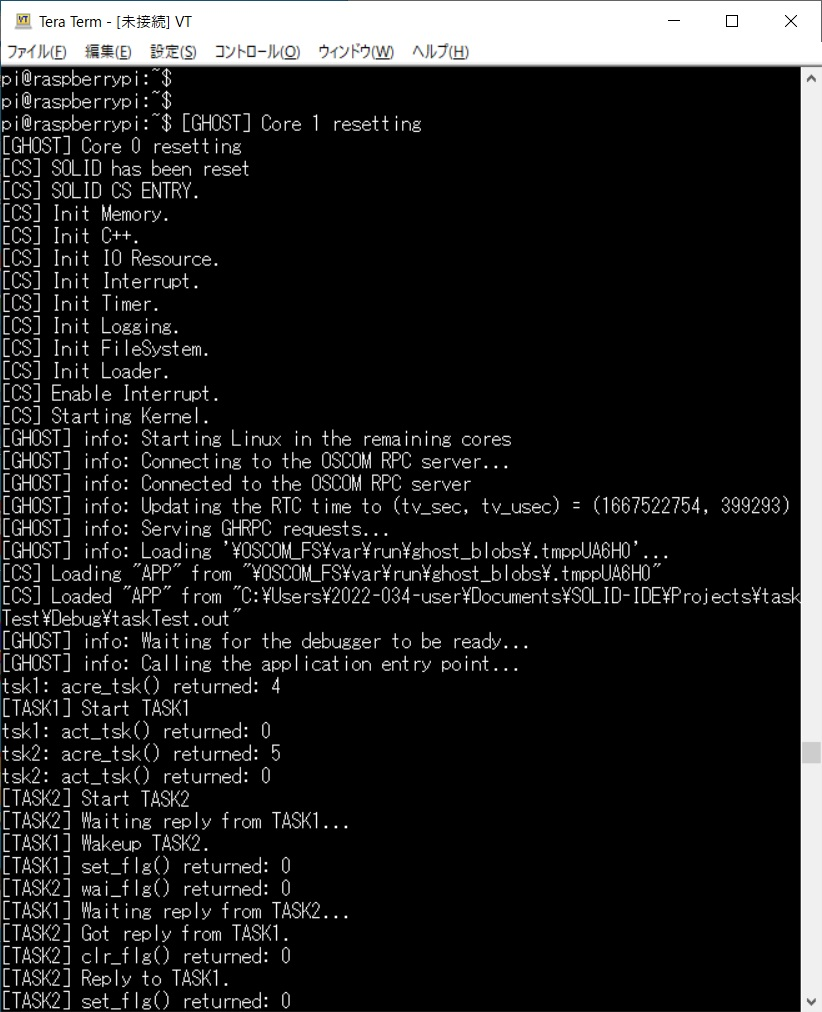
機会があれば、リアルタイムOSがどういう風に動作しているのか、についても解説しようと思います。
ここで、リアルタイムOSで動作するプログラムを開発する際に便利なデバッグ機能を見てみましょう。
・タスク状態表示
・イベントフラグ表示
を見ていきます。
3.1 RTOS
[デバッグ]⇒[ウインドウ]⇒[RTOSビューア] を選択します。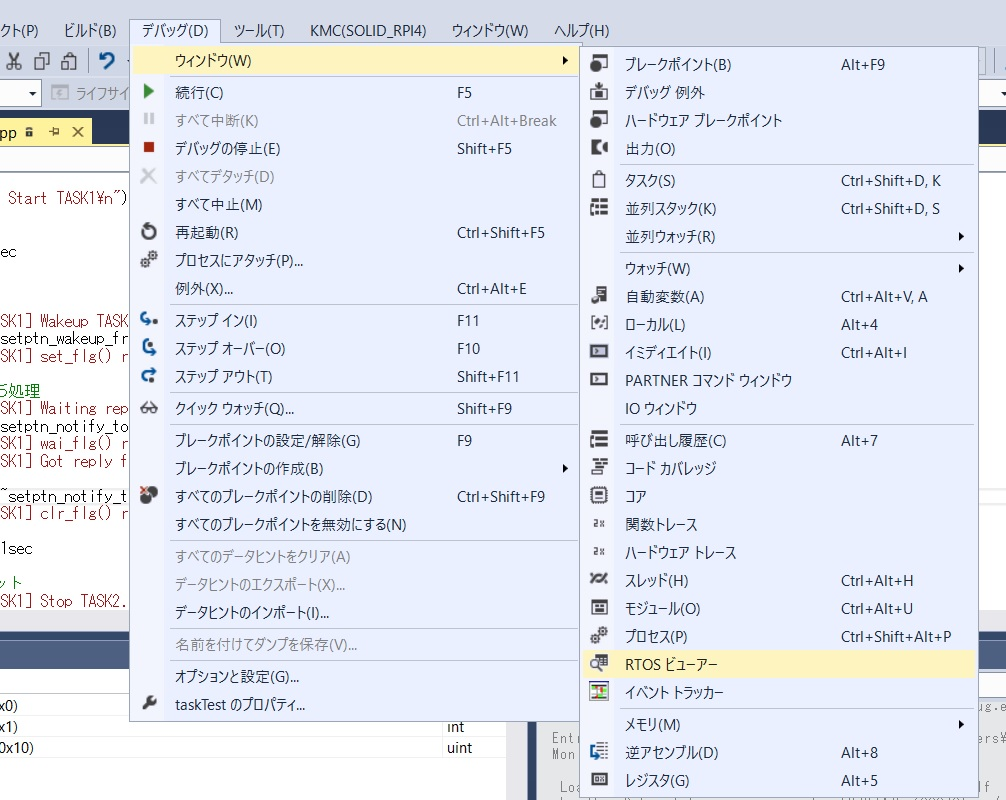
※RTOSビューアは、OSからたくさんの情報を取得するため、ビューアが開くまで少し待ちます。
以下のウインドウが開きます。
ここに、リアルタイムOSに特化したデバッグ機能が集まっています。
3.2 タスク状態表示
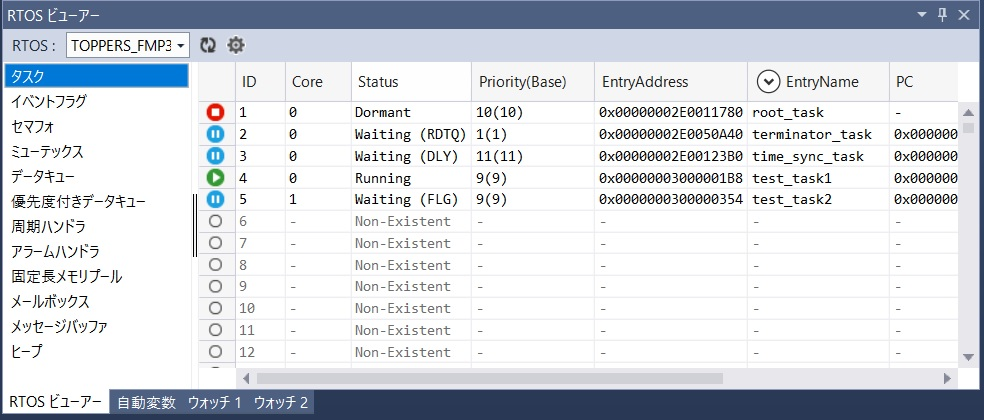
RTOSビューアで各タスクの状態を表示できます。
上記タスクの動作表の中の、⑥実行前でブレークポイントを貼った場合、以下のように表示されます。
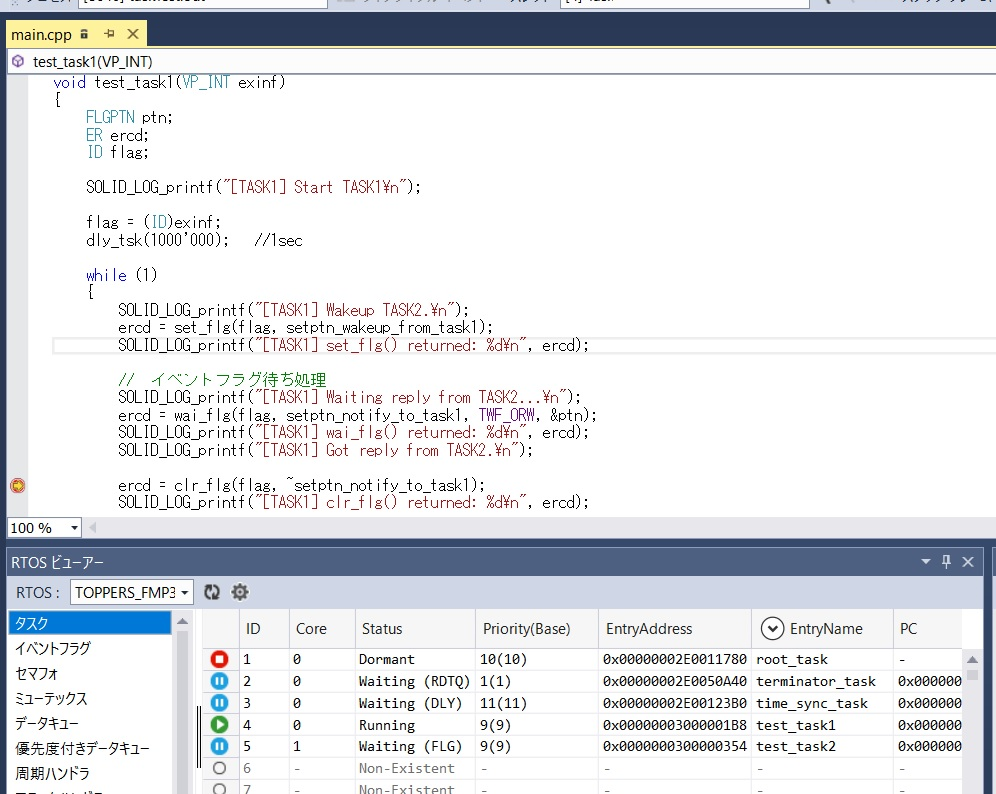
test_tsk1がRunning, test_tsk2がWaiting(FLG)と表示されており、動作表のとおりです。
3.3 イベントフラグ状態表示
次に、イベントフラグ状態を見てみます。
⑥実行前でブレークポイントを貼った場合、以下のように表示されます。
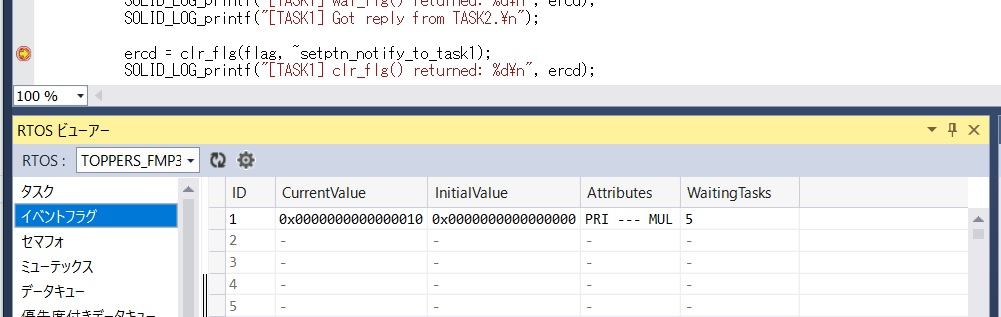
setptn_notify_to_task1( 0x10 )が設定されたまま、クリアする前であることが示されています。
その他の機能は、RTOSウインドウ左側にリストされていますので、ご興味ある方ぜひ見てみてくださいね。