

SOLID未分類 SOLIDで使えるリアルタイムOS(連載7)
SOLIDは、OSカーネルとして、μITRON仕様のリアルタイムOSを採用しています。
μITRON仕様のリアルタイムOS といっても、種類がありますよね。
SOLIDでサポートしているのは、オープンソースのTOPPERSです。
※FreeRTOSのサポートもあるようです。
具体的には、
・シングルコアプロセッサ向け(TOPPERS/ASP3)
・マルチコアプロセッサ向け(TOPPERS/FMP3、TOPPERS/FMP)
が使えます。
どちらも、32bit(AArch32), 64bit(AArch64)で使用できます。
そして、リアルタイムOSなので、TOPPERSも以下の特色を有します。
また、加えて、TOPPERS には以下の特色もあります。
具体的に見ていきます。
京都マイクロコンピュータ社で興味深い実験を行った資料を頂いたので、ご紹介します。
Linuxとの対比です。両社同じ評価ボードを使用しています。
・Linux
※先程と同様、CPU4つのうちの2つでLinux、のこり2つでSOLIDが動いています。
この動画は、Linux上で動作しているアプリケーションでLED制御しています。
Linuxの方は揺らぎがありますが、SOLID(TOPPERS)の方は揺らぎなく出ているように見えます。
これが、リアルタイムOSの大きな特徴である「リアルタイム性」です。
TOPPERSはμiTRON仕様のリアルタイムOSなので、acre_tsk()関数でタスクを生成、act_tsk()関数でタスクを起動、、、という風に、通常のμiTRON仕様のリアルタイムOSでよく見るシステムコールにより複数タスクを実行することができます。
以下のTOPPERS仕様書に、使い方等細かく記載されています。
https://www.toppers.jp/docs/tech/tgki_spec-321_richtext.pdf
ちなみに、SOLIDでは、デバッグ機能として、実行⇒ブレーク時にそれらタスクの情報を見ることができます。
試してみましょう。
起動タスク:
タスク1: エントリ関数child_task()
タスク2: エントリ関数child_task()
タスク3: エントリ関数child_task()
ルートタスク:エントリ関数root_task()
タスク1,2,3で実行する関数は、以下としました。
void child_task(intptr_t exinf)
{
int n = (int)exinf;
ER ercd;
for (;;){
WAIT_SEC(1);
}
}
child_task()関数内のWAIT_SEC(1); にブレークポイントを設定して実行してみます。
ブレーク後、再実行してみます。
各タスクが、かわるがわる実行されていくはずです。
では、実行してみましょう。
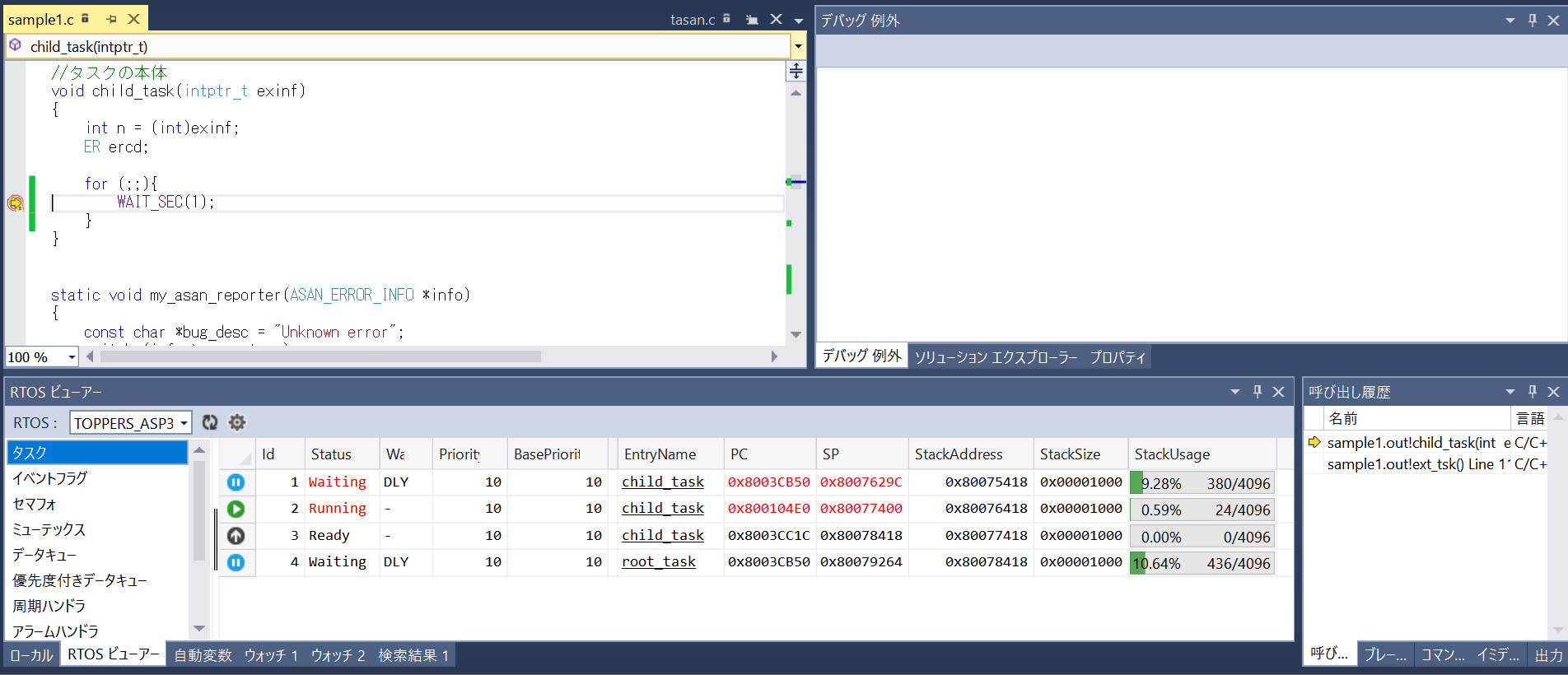
①1回目のブレーク時

タスク1がRunning状態で、実行されている関数はchild_task()であることがわかります。
さらに、タスク2と3はReady状態、ルートタスクはWaiting状態になっています。
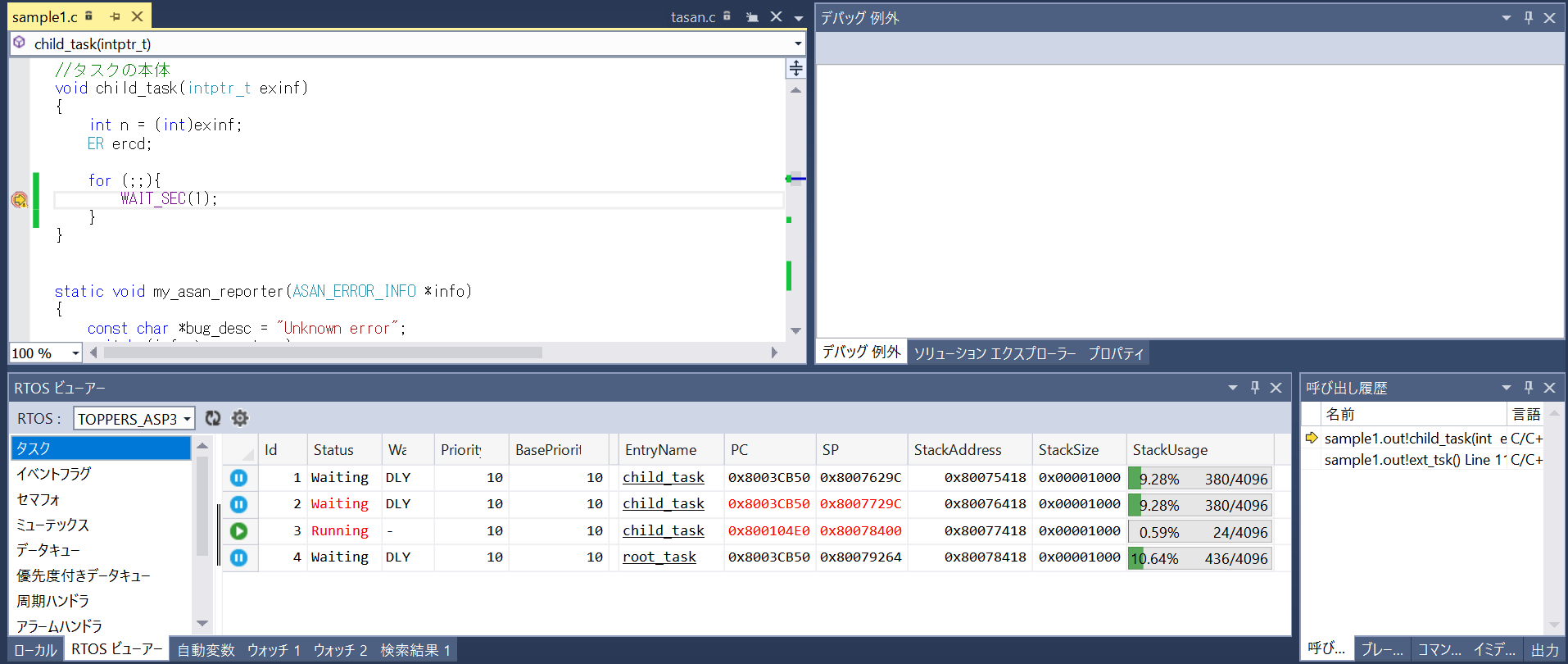
②2回目のブレーク時
タスク1が中断されWaiting状態になりました。スタックに何やら積まれましたね。
タスク2がRunning状態になりました。
ルートタスクはWaiting状態です。
③3回目のブレーク時
タスク2がWaiting状態になり、スタックに何やら積まれました。
タスク3がRunning状態になりました。
タスク1はまだWaiting状態ですね。
ルートタスクもWaiting状態です。
④4回目のブレーク時
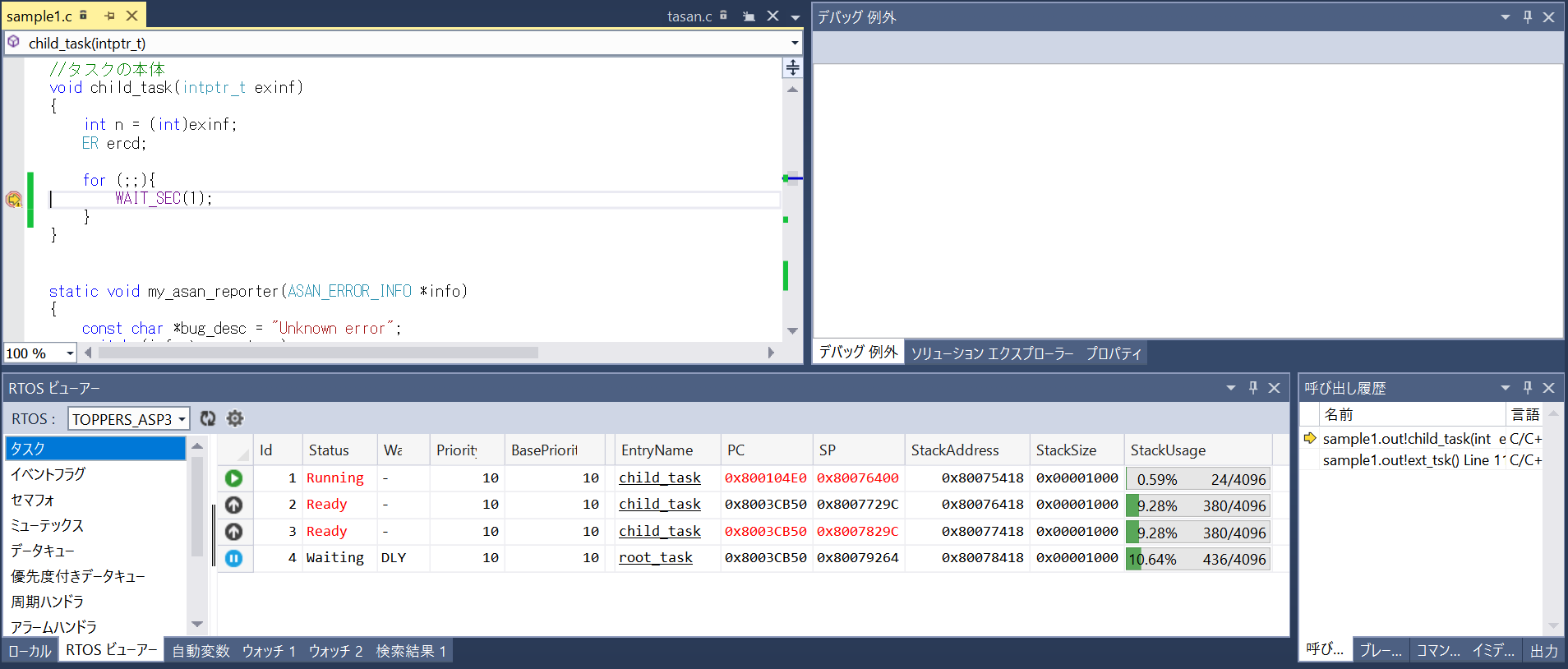
再びタスク1がRunning状態になり。
タスク2と3がReady状態ですね。順番が来るのを待っている状態ですね。
ルートタスクはWaiting状態です。
⑤child_task()関数内のブレークを削除し、ルートタスク内でブレーク
ルートタスクが動作しているところを見たいので、child_task()関数内のブレークを削除した上で、ルートタスク内にブレークを設定し実行します。
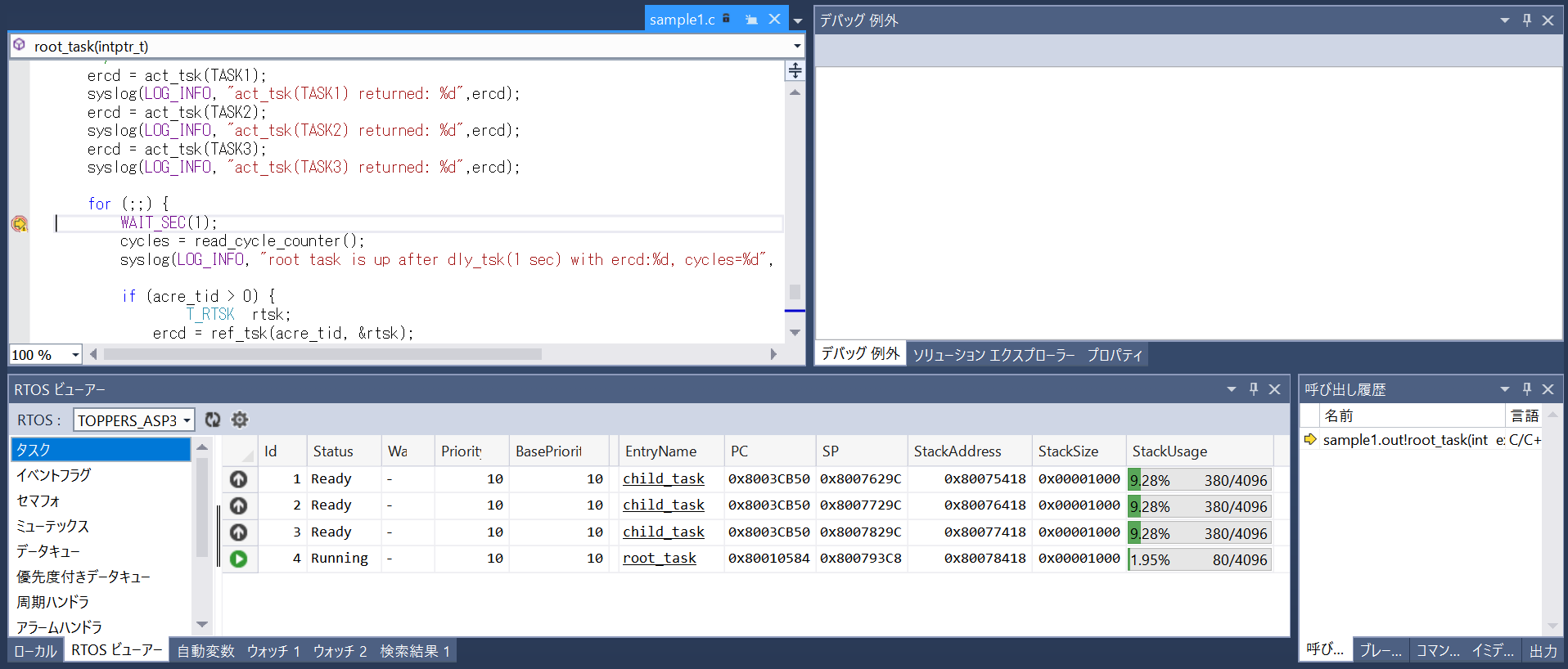
ルートタスクがRunning状態になりました。
かわるがわるタスクが実行されていることがわかります。
作成したタスクに優先度をつけることができます。
先程の例では、すべてのタスクの優先度が10でした。

より応答性能を上げたいタスクに対し優先度を高くし、そうでもないタスクの優先度を低くしたりすることができます。
当然のことながら、そのファームウェアで何をしたいのか、によりますが、メモリフットプリントが基本的にLinux等のようなリッチなOSよりも小さいです。
ご参考に、手元のサンプルアプリで見てみると、OSやドライバすべて込みで、コード領域が180KBくらいです。
※手元のサンプルは、MMUドライバ等、いろいろ入ったフルスペックのOSです。
シュリンクすればもっと小さくなります。
1MB全然行っていませんね。

先程、タスクを起動するところで触れましたが、タスク生成、起動等のシステムコールが準備されています。
その他にも、タスク間通信、時間管理機能、、、等々、いろいろあります。
そのことについても、以下のドキュメントの「4. カーネルAPI仕様」に記載されています。
https://www.toppers.jp/docs/tech/tgki_spec-321_richtext.pdf
こういったTOPPERSの持つ機能は、当然ですが、使う事ができます。
一部、SOLIDにおいて機能拡張、変更等されていますが、そちらについては以下URLに記載されています。
https://solid.kmckk.com/SOLID/doc/latest/os/kernel/api_spec.html
TOPPERS第三世代は、Ticklessカーネルだそうです。
え?インターバルタイマなし?
OSにはタイマが常時動いていて、一定の間隔(インターバル)でタイマ割り込みを発生させる。そしてその定期的な割り込みで、カーネルはタスクスケジューリング等を行う(タスク生成時や割り込みは別として)、というのが常識だと思っていたのですが!
ずいぶん前から、LinuxカーネルもTicklessで動けるようになっているではありませんか!
確かに、消費電力&リアルタイム性という意味では、常時タイマ割り込み発生するのは少し邪魔ではありますよね。
タイマ割り込みで発生する定期的な割り込みが絶対に発生する、という事になるので、その間はCPUが動かなければなりません。
Ticklessカーネルでは、基本的にイベントドリブン。
必要な時のみ、必要なタイマを起動させる。
なので、必要な時に起動させる手間がかかるのは仕方ないとして、必要がない時はCPUはずーっと何もしないので、消費電力は抑えられる&即時応答できる。さらに必要以上にタイマ割り込みルーチンが動かないので、キャッシュの入れ替えが少なくなり効率良くなる。
もちろん、これらはカーネルで行う事なので、アプリ側から特に気を使うことなく今まで通りの使い方でOKです。
TOPPERS第三世代は、そういうカーネルとして動作することも可能との事です。
SOLIDでは、多種多様なCortex-A CPUに対応できるよう、CPUを抽象化するレイヤを持っています。
このレイヤは「SOLID Core Service」と呼ばれています。
以下は公式のSOLID紹介資料内にあるブロック図です。
TOPPERSの下位部にあることがわかります。
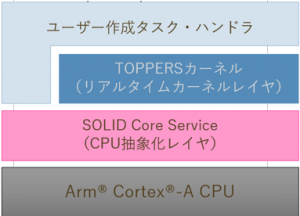
SOLIDでは、SOLIDでは、TOPPERSがCPUのリソースをアクセスする必要がある際、SOLID Core Serviceを介してアクセスができるように設計されています。
SOLID Core Serviceは、CPUを操作するための様々なAPIが準備されており、それらは以下のURLに記載されています。
https://solid.kmckk.com/SOLID/doc/latest/os/core-service.html
前回ご紹介した、MMU関連APIも、SOLID Core ServiceのAPIです。
その他にも、割り込みコントローラ制御、タイマ制御等、リアルタイムOSを動作させるのに欠かせない機能が盛り込まれています。
それだけでなく、ユーザ作成タスクからも使えるようになっています。
例えば、割り込みコントローラを制御したいのは、カーネルだけではありませんよね。
ユーザ作成タスクからでも、簡単に割り込みを使えるようにするため、SOLID Core Serviceはユーザ作成タスクからもコールすることができます。