

SOLID未分類 SOLID for Raspberry Pi 4 (連載19)
では、具体的に、割り込み登録用構造体には何を設定しましょうか。
typedef struct _SOLID_INTC_HANDLER_ {
int intno;
int priority;
int config;
int (*func)(void*, SOLID_CPU_CONTEXT*);
void* param;
} SOLID_INTC_HANDLER;
今回、送信・受信と2つの割り込みを使用するので、割り込み登録用構造体が2つ必要になると思いきや、違うようです。
説明します。
Raspberry Pi 3では、独自の割り込みコントローラが搭載されていますが、
Raspberry Pi 4のBCM2711では、加えて、GIC-400コントローラも搭載されました。
何が言いたいかというと、Raspberry Pi 4では、
・レガシーコントローラ(独自のもの)
・GIC-400コントローラ(Cortex標準のもの)
の二つの割り込みコントローラが存在します。
かといって、二つ共存するわけではありません。
BCM2711マニュアルのP.85に書かれてありますが、
BCM2711 ARM Peripherals (raspberrypi.com)
初期値ではGIC-400が選択されており、変更することが可能です。
SOLID-OSでは、GIC-400を使います。
intnoにはGIC-400の割り込み番号を設定することになります。
次に、今回対象のSPI割り込みが、GIC-400のどの割り込み番号に対応するか、を調べます。
SPI割り込みはすべてORされ、VideoCoreのIRQ54にマップされているようです。
BCM2711マニュアルのP.87に書かれてあります。

(BCM2711 ARM Peripherals (raspberrypi.com) P.87から抜粋)
では、VideoCoreのIRQ54はGIC-400では何番に割り振られるのでしょうか。
BCM2711マニュアルのP.89にオフセット値が書かれてあります。
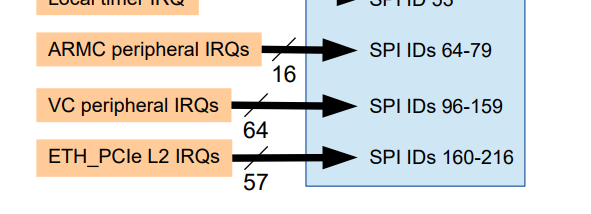
(BCM2711 ARM Peripherals (raspberrypi.com) P.89から抜粋)
#ややこしいのですが、右側に記載されている"SPI"は、Shared Peripheral Interruptの略で、今回対象の通信用SPI(Serial Peripheral Interface)とは異なります。
VideoCoreのPeripheral IRQsは、GIC-400の96番以降に割り振られています。
したがって、SPI割り込みは 96 + 54 = 150になります(と思います。違ったら次回訂正します。)
という事で、割り込み番号150に対する割り込み登録用構造体を一つ作成すればよさそうです。
intno (割り込み番号):150
priority(優先順位):許可されている最大値としましょう。SOLID_INTC_GetPriorityLevel() で取得できます。
config:
割り込み設定(ICFGR) 2bitのみ有効 -1を指定した場合はconfigを変更しません
SPI(Serial Peripheral Interface)割り込みは、SPI(Shared Peripheral Interrupt)なので、実装依存ですね。
-1を設定すれば良いのかな?ま、やってみつつ考えましょう。
param:
割り込み発生時に関数に引き渡される第一引数ですが、今回は別に使わないのかな。。。
では次、割り込みハンドラについて考えてみます。