

SOLID未分類 SOLID for Raspberry Pi 4 (連載18)
今回、加速度センサからの値を保持しておくバッファを4096バイト分アサインさいています。
これがオーバーフローした場合、どう動くのか見てみました。
Rustはメモリ安全でに設計されていますが、アーキテクチャまで保証しているわけではありません。それはプログラマが考える事です。
そのプログラマが失敗した場合、どのように動くのか?
加速度センサからの値をバッファに格納しているコードは以下です。
let mut state_in_1 = state_in.lock().unwrap();
if state_in_1.num_bytes>(4095-12){
state_in_1.num_bytes = 0;
}
let count = state_in_1.num_bytes;
for n in 0..4 {
state_in_1.bytes[count + n] = retbytes_x[n];
state_in_1.bytes[count + n + 4] = retbytes_y[n];
state_in_1.bytes[count + n + 8] = retbytes_z[n];
}
state_in_1.num_bytes+=12;この中の以下の部分。
if state_in_1.num_bytes>(4095-12){
state_in_1.num_bytes = 0;
}この部分が、バッファオーバーフローを防いでいる部分です。
これを以下のように変更し、わざとオーバーフローさせてみましょう。
if state_in_1.num_bytes>(4095){
state_in_1.num_bytes = 0;
}
実行してみました。
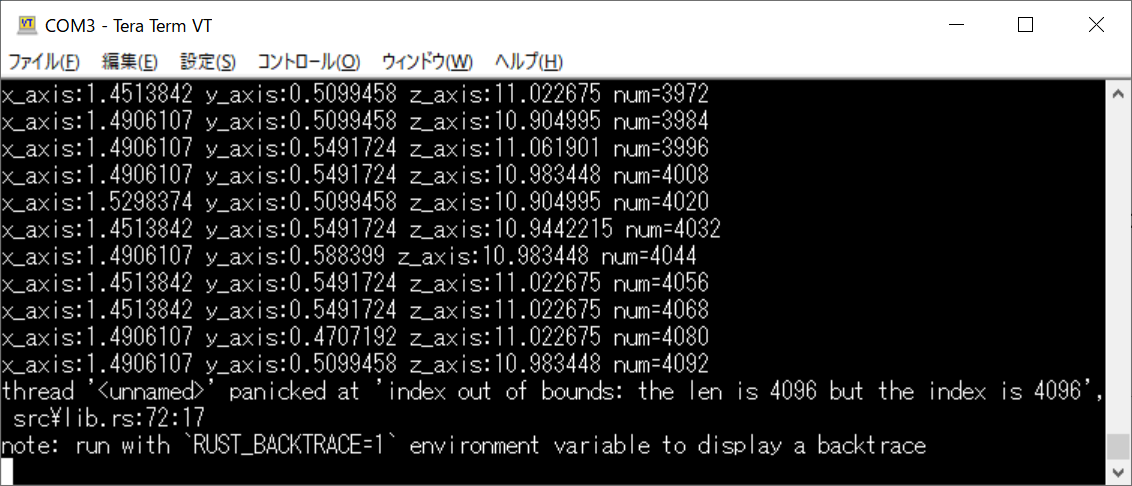
超えたからパニックになったよ、と表示されました。
CPUの例外に飛んで暴走したりはしませんでした。
ちなみに、SOLID-IDEの操作で、パニック時にブレークさせることが可能です。
シンボル名 rust_panic を指定してブレークポイントを設定すればOKです。
すなわち、配列のバッファオーバーランなどの実行時エラーについて、デバッグ時には rust_panic()にブレークポイント設定しておけば、それが発生したときに捕まえることができる、という事ですね。
やらかした!をデバッグするのが容易になりそうです。
さらに、ソースコード上で std::panic::catch_unwind 関数を使って、パニックのキャッチコードを書くことができます。ですのでパニックを捕捉し復帰を試みる等が可能です。
加えて、パニックを復帰させるより、システムをリセットしてしまいたい場合もあります。
この場合、パニックの捕捉を無効化し、常にアボートするようにするコンパイルオプションもあります。
このバッファはArc<Mutex<_>>型で各スレッドに渡されています。
せっかくなので、この状態のままTCP/IP送信スレッドからアクセスする実験をしてみましょう。
PCアプリからTCP/IP送信してみます。
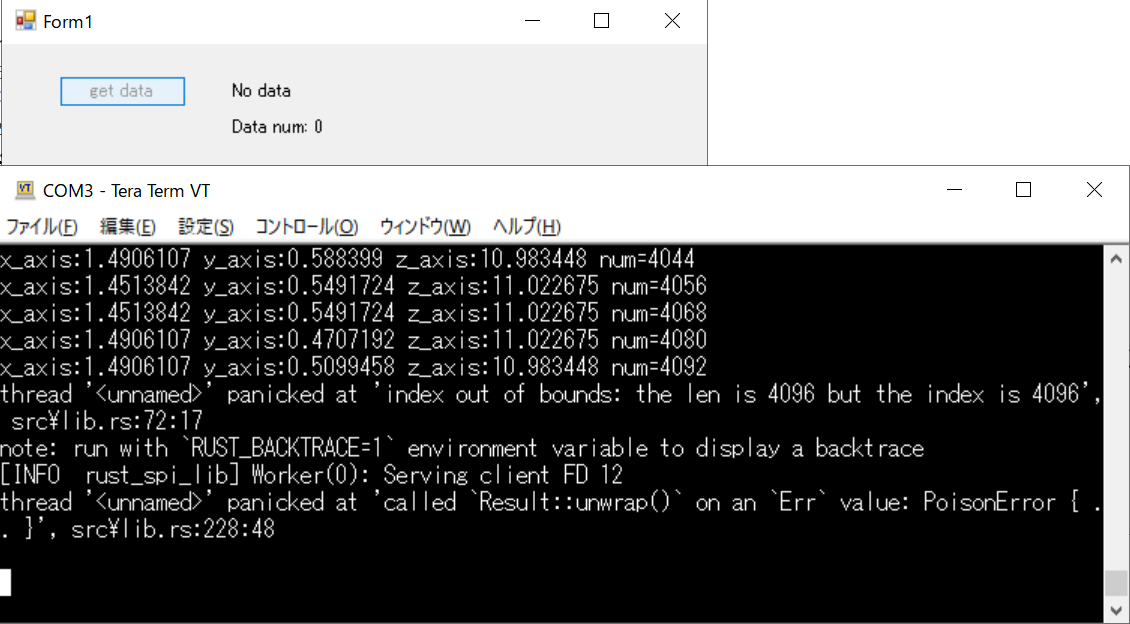
unwrap()でPoisonErrorが帰ってきました!
そして特にデッドロックはしていない様子です。
もう一度PCアプリからTCP/IP送信してみます。
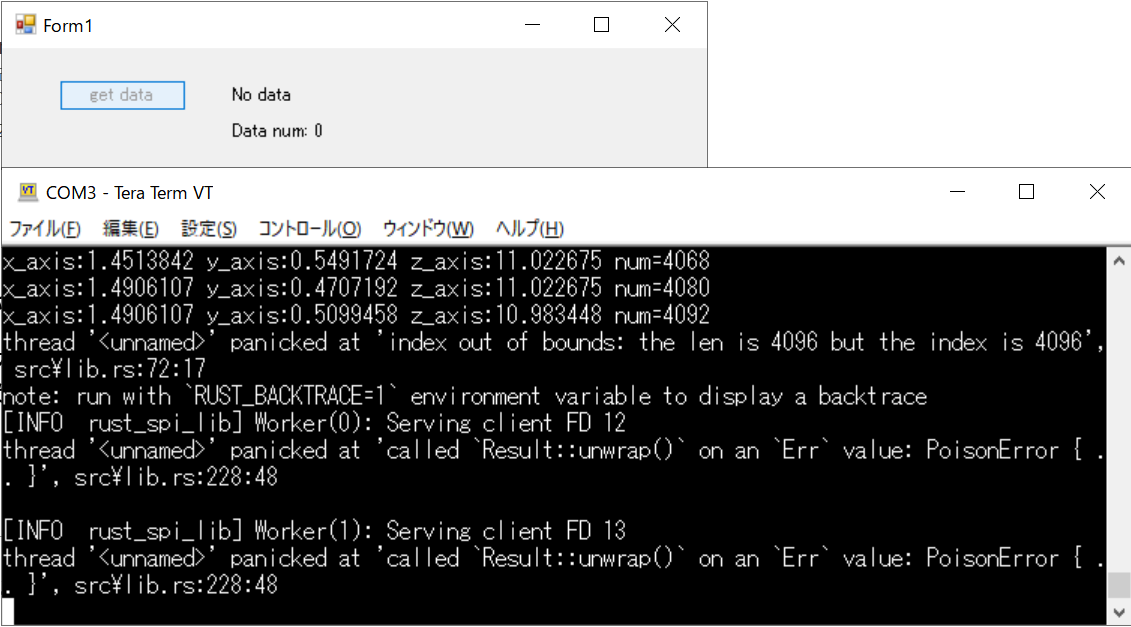
同じエラーがもう一つ増えました。という事はデッドロックはしていないという事です。
今回はここまで。
今回まで作成したプログラムをzip化しました。
以下からダウンロードできます。
PC側C#プログラム(Visual Studio 2019系)
(bin\Releaseフォルダ内にexecutableファイルがあります)
Raspberry pi4があれば試してみることが可能です。
何かのお役に立てば幸いです。
#PC側プログラムは何のエラーチェックもしていないので、データが返信されてこない場合等例外が発生します。
次回は、SPI制御に戻り、割り込み処理の実装について考えていきたいと思います。