SOLID未分類 SOLID for Raspberry Pi 4 (連載15)
例えば加速度センサADXL345のレジスタに書き込む以下の関数について、見てみます。
pub fn regwrite(regaddr: u32, writeval: u32)
--------- [指摘内容]---------
意味に即した型を使用するのが慣習的です。例えば、ADXL345のレジスタアドレスと値はそれぞれ8ビット幅なので、u8が引数型になります。
--------------------------------
ここで筆者がなぜu32にしたかというと、これはBCM2711チップの内蔵I/Oである SPIのFIFOレジスタに書き込むデータであり、そのFIFOレジスタのサイズが32ビットだからです。
Cargoパッケージ「bcm2711_pac」に含まれるライブラリクレートに以下のように定義されています。
register_bitfields! {u32,
pub FIFO [
/// Read from RX FIFO or write to TX FIFO
///
/// *DMA Mode (`DMAEN` set):* If `TA` is clear, the first 32-bit write
/// to this register will control `SPIDLEN` and `SPICS`. Subsequent
/// reads and writes will be taken as four-byte data words to be read
/// or written to the FIFOs.
///
/// *Poll/Interrupt Mode (`DMAEN` clear, `TA` set):* Writes to the
/// register write bytes to the TX FIFO. Reads from the register read
/// bytes from the RX FIFO.
DATA OFFSET(0) NUMBITS(32) [],
]
}
u32ですね。
すなわち、筆者はアクセス先のレジスタサイズと同じサイズ(u32)にしました。
しかしそうではなく、使い道に即した型にすることが慣習だとの事でした。
今回はFIFO32ビット分すべて使用するわけではありません。
理由はADXL345のレジスタアドレスが8ビット、値も8ビットだからです。
8ビット分押し出せば済みます。
したがって、ここはu8とします。
しかしそうすると、問題が出てきます。
先述の通り、FIFOのレジスタは32ビットアクセスです。
これについても、アドバイス頂きました。
--------
u8 -> u32は無損失変換なので、“.into()” で変換できます。
例:
spi::FIFO::DATA.val(writeval.into()));
--------
ふむふむ。
“.into()” は、組み込みではいろいろ出てきそうですね。
要チェックです。
同じことは受信関数にも言えます。
-----
pub fn regread(regval: u32) -> i32 {
------
引数はu8にしましょう。
戻り値はi32、このままで。
-----
pub fn regread(regval: u8) -> i32 {
------
そしてFIFOのアクセスも同様に“.into()” で変換。
―――
//(3)FIFOに送信データを書く(送信データ:ライト対象の加速度センサのレジスタ値)
spi_regs().fifo.write(spi::FIFO::DATA.val(regval.into()));
―――
これで完了。
受信部の最後、符号付に変換したり型変換したりしている部分があります。
retdata = i32::try_from(retdata_l | (retdata_h << 8)).unwrap();
if (retdata & 0x8000) != 0x0000 {
retdata = (!retdata & 0xFFFF) + 1;
retdata = 0 - retdata;
}ここ、なんと一行で書けてしまいました!
[ポイント1] FIFOから読んできたretdata_lとretdata_h, u32だがu8として扱い、さらにそれらをfrom_le_bytesを用いて下位側から詰めていく。
したがって、以下の一行になりました。
retdata =i32::from(i16::from_le_bytes([retdata_l as u8, retdata_h as u8]));
受信関数の最後のreturnは不要です。
(と、過去の記事に書きました。自分で。。。)
https://note.com/yn_2022/n/nf64d5d2b3547#d3706e78-c097-4c12-be4d-941c174e2f63
「Rustでは、return文がなくても、最後の式の値が戻り値になります。」
retdata = i32::from(i16::from_le_bytes([retdata_l as u8, retdata_h as u8]));
return retdata;という事で、returnを削除し、式にします。
i32::from(i16::from_le_bytes([retdata_l as u8, retdata_h as u8]));ビルドエラーが出ました。
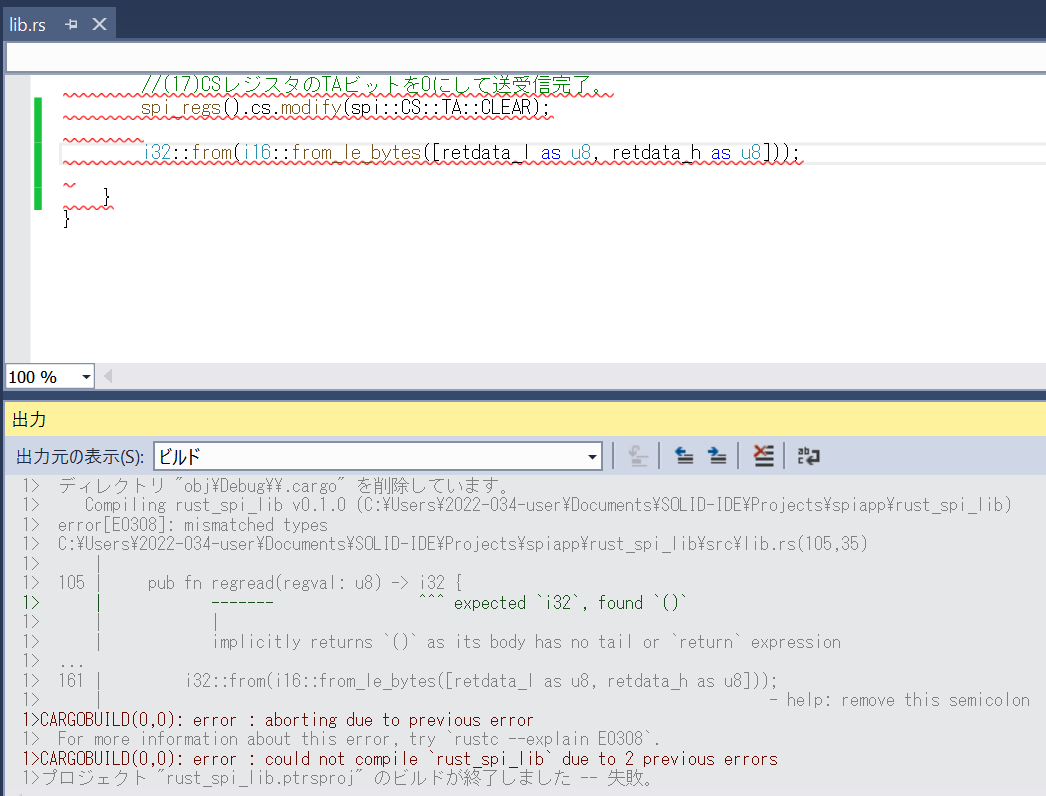
セミコロンがあると、「式」ではないそうです。
なので、セミコロンは削除し、無事、ビルドが通りました。
ソースコードは最後にまとめて書きます。
変わらず動きました。